Remotely accessing webcams is a fairly common activity that many people perform routinely. It is my intention in this chapter to show you how to put together three projects, each with unique capabilities. The first project uses a standard USB webcam with a comprehensive open source software package named Motion. The second project deals with the specially designed Pi Camera, which only works with the Pi. The final project also uses the Pi Camera but uses the Motion software instead of the specialty applications that typically come bundled with the Pi Camera.
Conventional Webcam :
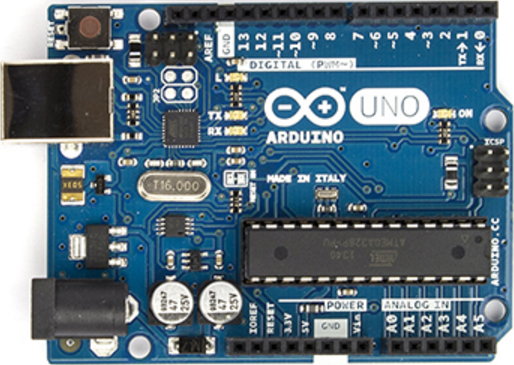
The first project in this chapter uses a high-quality webcam that connects to the Pi using one of the PI’s two USB ports. I used a Logitech C920, shown in Figure 1

Fig 1: Camera
This a high-definition camera capable of producing excellent videos, but the open source software used within this project will constrain its performance. You may still use any one of the many different webcams that are available as the video requirements are modest and the current Raspian distribution will automatically detect and support many types, including older ones. If you already own a webcam, my suggestion is to plug it into one of the Pi’s USB ports and then type the following into a command line:
lsusb hit enter
Figure 2 is a screenshot of the command’s output. Device 012 is the webcam while
the other Logitech device listed as 006 is a keyboard. If in doubt, with multiple devices
from the same manufacturer, simply unplug the device and rerun the command to see
which one disappears. the other Logitech device listed as 006 is a keyboard. If in doubt, with multiple devices from the same manufacturer, simply unplug the device and rerun the command to see which one disappears.

Fig 2: lsusb output
Note that I have found this particular webcam to be somewhat sensitive in terms ofthe USB port it is plugged into. It may not be detected when plugged into one of the two Pi USB ports, in which case, try plugging it into a powered USB hub that provides at least the minimum specification current of 500mA for each USB port.
Motion Software Package:I selected an open source software package named Motion to enable remote viewing ofthe webcam. This is a very comprehensive package containing a substantial number offeatures, far more than could be covered in this chapter. Creating similar software for amore traditional board, such as one from the Arduino series, would be a substantialundertaking.
The key feature that is used from the Motion package is the built-in web server. This server receives the video stream from the webcam and sends it off in TCP/IP format over a predefined port. All you need to remotely view the webcam video is a browser pointed to the Pi’s IP address and port number, nothing more. This feature makes the viewing exercise extremely simple. But there is more: Motion enables you to use more than one webcam. You can set up multiple webcams, each with its own port number. Thus, you can monitor multiple locations throughout the observed area. Each webcam video feed is handled by what is known as a thread within the Motion software. I recognized provision for four threads in the Motion configuration file from which I presume four webcams could be handled. However, I seriously wonder if the Pi has the processing power to manage four simultaneous video feeds. In any case, this project is concerned with only one feed, which I know works very well. for four threads in the Motion configuration file from which I presume four webcams could be handled. However, I seriously wonder if the Pi has the processing power to manage four simultaneous video feeds. In any case, this project is concerned with only one feed, which I know works very well. for four threads in the Motion configuration file from which I presume four webcams could be handled. However, I seriously wonder if the Pi has the processing power to manage four simultaneous video feeds. In any case, this project is concerned with only one feed, which I know works very well.
Motion Setup:You will need to install the Motion package before using it. I strongly suggest that you
update and upgrade your distribution prior to installing Motion. Simply type the following at a command-line prompt to update and upgrade the Raspian distribution in use:sudo apt-get update
sudo apt-get upgradeBe patient as the updates and upgrades can take a bit of time if there are many to
install. Next, install Motion by typing the following:sudo apt-get install motion
Again, be a bit patient as this package is over 20MB in size and has many componentparts. Motion will be run in the “background” as a daemon, which means that it will beconstantly available for service. To enable the daemon, you must edit the/etc/default/motion file. Type the following:sudonano /etc/default/motionYou will see in the nano editor the line:start_motion_daemon=noChange the no to yes, and then save the nano buffer (CONTROL-O) and exit the editor
((CONTROL-X).
Next comes Motion’s configuration file. Motion has no graphics user interface (GUI)
so it must be configured by making changes to its configuration file,
/etc/motion/motion.conf. This is a very big text file—well over 600 lines, although much of the file content consists of comments inserted to help the user. Fortunately, only a few changes are necessary for this project. I have provided the changes in Next comes Motion’s configuration file. Motion has no graphics user interface (GUI) so it must be configured by making changes to its configuration file,/etc/motion/motion.conf. This is a very big text file—well over 600 lines, although much of the file content consists of comments inserted to help the user. Fortunately, only a few changes are necessary for this project. I have provided the changes in
Table 2 to be made by configuration file section, but I do not show you step-by-step instructions as you should be fairly comfortable with how to use the nano editormade by configuration file section, but I do not show you step-by-step instructions as you should be fairly comfortable with how to use the nano editor.

Fig 2 : Motion configuration file changes
Start the nano editor session as follows:sudonano /etc/motion/motion.confMake the changes as shown in Table 1 if the contents of the table have not already
been configured. Save the changes and exit the nano editor. Now, you must start the Motion server, which is done by entering the following: been configured.Save the changes and exit the nano editor. Now, you must start the Motion server,which is done by entering the following:sudo service motion startOne nice feature of having the Motion web server running as a daemon is that it isautomatically started each time you boot the Pi. You may also stop or restart the service bytyping the following:
sudo service motion stopsudo service motion restart
That’s it for the changes to be made in the configuration file. I do want to briefly discuss why these changes were made. The change from daemon off to daemon on is obvious as it was needed to run Motion as a daemon. The next change making the port number 8081 is a bit historical as the Motion web service has traditionally been assigned to this port. It is not a required port number and you can easily change it to any number that you desire as long as it is greater than 1024 and less than 65535. This range avoids the “well known ports” and goes to the maximum possible port number. My recommendation is to leave it at 8081. Next open your web Browser and type your Raspberry Pi IP address and give port number to hit enter.